

こんにちは!アダムです。
今回はメカ設計者のために、モーターについての解説をします。
この記事で扱うメカ部品
・ACモータ(インダクションモータ、レバーシブルモータ)
・ステッピングモータ(パルスモータ)
・サーボモータ
・カップリング(それぞれのモーターとの相性について)
それぞれ順番に学びましょう!
モーターとカップリング
モーターの動きを伝える場合、大きく2つの取り付け方が一般的です。
その2つというのが、直結パターンとギヤ&ベルトパターンです。
後者のパターンでは、タイミングギヤとタイミングベルトを組み合わせることで、高精度は求められないですが、駆動可能です。
直結パターンの場合、シャフトなどにモーターの回転を伝えることで動かしたい動きを実現します。
その際、モーターとシャフトの間にはカップリングと呼ばれる部品が必要になります。
カップリングは、軸のズレを補う効果と2つの軸を繋ぐ効果を持ちます。
モーターとはそれぞれ相性がありますので、モーターの紹介の時にそれぞれ相性の良いカップリングを紹介します。
ACモータ
ACモーターのACとは、Alternate Current(交流)の略です。
交流とは、電圧が一定周期でプラスとマイナスに切り替わるので、電流の流れる向きが常に変化します。
プラスとマイナスが切り替わると言うことをイメージするのは難しいかもしてないですが、簡単に言うと砂浜の波打ち際です。
あっちいったり〜こっちいったり〜ラジバンダ○〜
ACモータは大きく分けて、インダクションモータとレバーシブルモータがあります。
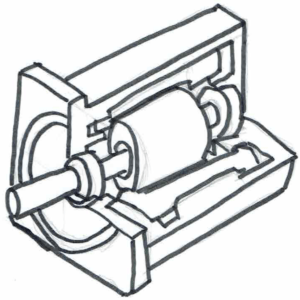
インダクションモータ
インダクションとは誘導という意味です。
その理由は、モーター内部の電磁石により電磁気を発生させ、誘導電力を生み、回転ローターを回すからです。
インダクションモータの特徴
インダクションモータは一方方向にしか回りません。
また、モーターを停止させるとき、単体では30〜40回転はオーバーラン(止めたい位置から更に動くこと)します。
原点センサを設置して回転を制御したい場合は、ブレーキパックを用意しないといけません。
ブレーキパックによってオーバーラン量は1〜1.5回転まで低減し、さらにギヤヘッドを使用することで更にオーバーラン量を減らすことができます。
ギヤヘッドにはそれぞれ減速比があり、例えば減速比が1/10なら、回転は1/10に抑えられます。
ギヤヘッドの利点は、オーバーラン量を減らすだけでなく、回転数を抑えることでトルクを増幅させることができます。
そして、インダクションモータ最大の特徴は価格の安さです。
インダクションモータにオススメのカップリングはオルダム型です。
オルダム型は真ん中に樹脂や金属のスライダーが入っており、スライドすることで、軸の偏心や偏角を調整します。
インダクションモータは位置決め精度が悪い部分での使用が想定されるため、許容誤差の大きいカップリングが良いです。
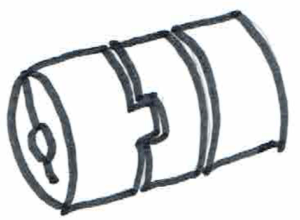
オルダム型カップリング
レバーシブルモータ
レバーシブルとは逆もできるという意味です。
つまり、一定方向しか回転できないインダクションモータとは違い、回転方向の切り替えもできます。
レバーシブルモータの特徴
レバーシブルモータには、摩擦ブレーキが備わっています。
摩擦ブレーキのおかげでオーバーランを抑えて瞬時に止まることができます。
また、その場で止まることもできます。
ある程度トルクは落ちることにはなりますが、定格トルクの10%程度は発揮できます。
かなり良いところばかり目に止まりますが、短所もあります。
それは、連続稼働に制限時間があるということ。
例えば、30分定格というものは30分以上の連続稼動は熱を帯びるため危険であることを指します。
この定格時間は、放熱機構があるものやギヤヘッドを取り付けたものは延びます。
ステッピングモータ
ステッピングモータとパルスモータは同じものを指します。
知らなかった方もいるのではないでしょうか。
ちなみに僕自身機械設計者として駆け出しの頃は、別のものだと思っていました(笑)
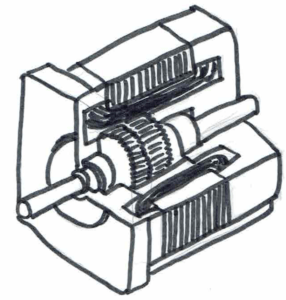
ステッピングモータの特徴
電源電圧が低くて良い(DC24〜48V)点に加え、静止時にトルクが最大となるため剛性が高い。
また、指令パルスとの同期生が高く、構造が単純のため比較的安価である。
しかし、高回転時の制御は難しく、急な動きの変化により脱調(指令入力とモーターの回転が同期しなくなること)が起こる。
ステッピングモータには、ドライバと呼ばれるモーターの動きを制御する部品が必要となります。
ドライバにパルス信号を入力することにより、モーターが駆動します。
このパルス信号には1パルスあたりの回転度合が決められています。
1パルスで0.72°回転するステッピングモータを1周360°回転させるには、500パルスを入力する必要があります。
また、パルス信号には周期がある、周波数が高くなるとモーター回転は速くなり、低くなると遅くなります。
ステッピングモータにオススメのカップリングは、ディスク型orスリット型です。
ディスク型は間に板ばねが入っており、スリット型は1本の丸棒にスリット(切れ目)が入っています。
共に偏心、偏角はもちろん補正でき、エンドプレー(スラスト方向のあそび)に強いです。
バックラッシ(あそび)はゼロです。
違いは、許容トルクで、ディスク型は高いがスリット型は低いです。
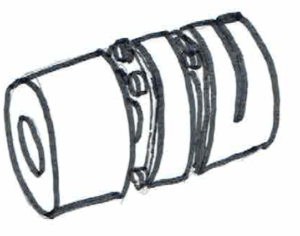
ディスク型カップリング
サーボモータ
サーボとは、物体の位置や姿勢を制御量として目標値に追従するように自動で動く仕組みのことです。
目標値に対してプラスマイナスの細かい動きで漸近(限りなく近づけること)させます。

サーボモータの特徴
サーボモータはステッピングモータに比べ、滑らかに動くことができ、脱調が起こりません。
つまり、高回転において優位性があり、高回転でも高精度な位置決めが可能です。
しかし、モータもドライバも複雑であるためコストが高く、電源電圧も高いものが必要です。
また、トルクの変化によって生じる偏差から位置制御を行うため、機械的に剛性が必要となります。
サーボモータはエンコーダ(回転検出器)によって回転速度や角度を検出し、ドライバへフィードバックすることで位置決め精度を高めています。
サーボモータにオススメのカップリングはステッピング同様ディスク型とスリット型です。

スリット型カップリング
かなり噛み砕いて解説したつもりですが、もしまだわからないことがあればアダム(@bonjin_yusha)までご連絡ください。


コメント